revista de divulgación del Instituto de Astrofísica de Andalucía

Desarrollo de robótica avanzada para los grandes cartografiados de galaxias
1. LOS CARTOGRAFIADOS DEL FUTURO
La nueva generación de cartografiados cosmológicos como DESI, PFS y 4MOST medirá el efecto de la energía oscura en la historia de expansión del universo. Obtendrán espectros en los rangos óptico e infrarrojo para decenas de millones de galaxias y cuásares, permitiendo construir un mapa tridimensional que abarcará desde el universo cercano hasta diez mil millones de años luz. Este mapa proporcionará una determinación muy precisa de la relación entre la distancia y el corrimiento hacia el rojo de las galaxias debido a su progresivo distanciamiento (un efecto de la expansión del universo).
.")
Uno de los desarrollos clave que debe de abordarse para construir estos nuevos espectrógrafos alimentados por fibras ópticas consiste en reemplazar las técnicas actuales que colocan manualmente las fibras ópticas. Este es el caso de los cartografiados llevados a cabo por el Sloan Digital Sky Survey: en el caso de BOSS y eBOSS se perforan mil agujeros en una placa de aluminio de un metro de diámetro y luego se inserta a mano cada fibra en cada uno de estos agujeros donde se espera observar la luz de cada objeto. Este trabajo tan tedioso no tiene sentido para los cartografiados espectroscópicos mencionados anteriormente, y que durante la próxima década tomarán millones de espectros. Para estos instrumentos se planea usar posicionadores robotizados que colocarán automáticamente cada una de las fibras ópticas en la posición donde se espera la luz de cada galaxia (DESI, por ejemplo, contará con cinco mil robots). Estos posicionadores robóticos necesitan ser muy precisos -se tiene que alcanzar una precisión de una micra en el posicionamiento de cada fibra óptica-, deben de ser rápidos, robustos y no pueden colisionar con otros robots cercanos.
2. EXPERIENCIA EN EL IAA
La experiencia y los conocimientos adquiridos durante los últimos diez años por nuestro equipo en el Instituto de Astrofísica de Andalucía en el desarrollo de estos posicionadores robóticos de fibra óptica nos ha hecho merecedor del reconocimiento como uno de los principales grupos expertos en esta tecnología a nivel mundial. Esta experiencia comenzó en el año 2007 con el desarrollo de mecanismos de posicionamiento de fibra de alta precisión para el espectrógrafo SIDE propuesto para el Gran Telescopio Canarias. El IAA-CSIC diseñó junto con la empresa española AVS un posicionador de eje excéntrico de veinticinco milímetros de diámetro. Se construyó un prototipo a escala real cuya funcionalidad y requerimientos mecánicos fueron probados satisfactoriamente en nuestro laboratorio [1]. En el diseño y construcción de la electrónica y del software de control participó la Universidad de Barcelona. Finalmente, el espectrógrafo MEGARA fue seleccionado para el GTC en lugar de SIDE. AVS aplicó nuestro desarrollo y experiencia en común para diseñar y construir los cien robots de MEGARA.
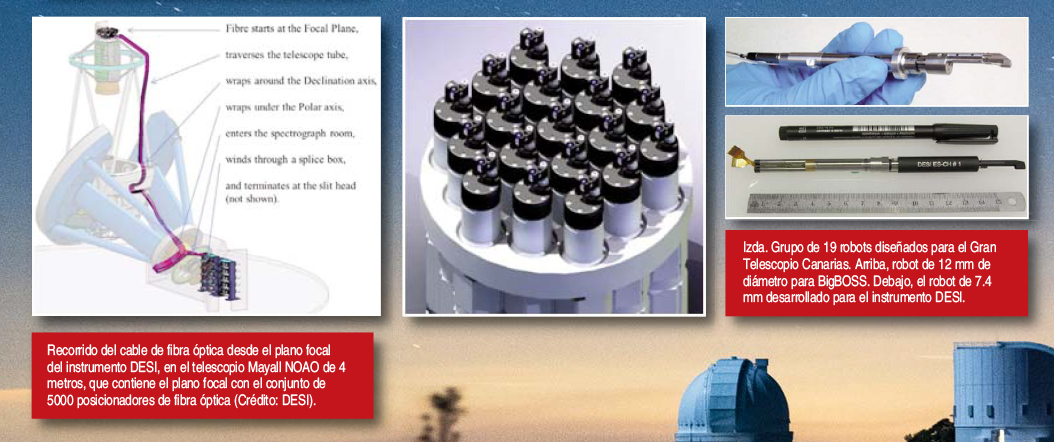
Más tarde, durante los años 2010-2015, nuestro grupo trabajó en el concepto, diseño completo (mecánica, electrónica, control, comunicaciones), construcción de prototipos y pruebas de un posicionador de doce milímetros y otro de 10.4 milímetros de diámetro para los espectrógrados BigBOSS y DESI respectivamente [2]. En enero de 2010, el IAA-CSIC fue invitado a formar parte del estudio de viabilidad del proyecto BigBOSS para desarrollar el sistema posicionador de fibra óptica. En 2012 otros grupos en España –el Instituto de Fisica Teórica UAM/CSIC y el HCTLab de la Escuela Politécnica Superior de la UAM (EPS-UAM) en Madrid– se sumaron a estos desarrollos, en colaboración con la empresa española AVS y nuestros colegas suizos de la EPFL y la empresa Faulhaber MPS. Ambos prototipos fueros probados, y sus especificaciones verificadas, en las instalaciones del Lawrence Berkeley National Laboratory, institución que lidera el proyecto DESI.
3. PRESENTE Y FUTURO
 Gracias a todos los esfuerzos dedicados al desarrollo del robot posicionador de fibra óptica para el instrumento DESI, el Instituto de Astrofísica de Andalucía es miembro de la Colaboración DESI. Este instrumento, instalado en el telescopio Mayall de cuatro metros en el Observatorio de Kitt Peak, comenzará a tomar datos en la primavera de 2019. La experiencia y las habilidades desarrolladas durante una década nos han llevado a afrontar nuevos retos tales como el desarrollo de sistemas innovadores de posicionadores de fibra óptica para la nueva generación de telescopios de entre diez y doce metros de gran de campo. En particular propusimos junto con la empresa suiza MPS y el grupo de la EPS-UAM un diseño para el telescopio de doce metros Maunakea Spectroscopic Explorer. Otra oportunidad que estamos valorando es un nuevo diseño para el futuro telescopio de la ESO que se dedicará a la espectroscopía multiobjeto de gran campo.
Gracias a todos los esfuerzos dedicados al desarrollo del robot posicionador de fibra óptica para el instrumento DESI, el Instituto de Astrofísica de Andalucía es miembro de la Colaboración DESI. Este instrumento, instalado en el telescopio Mayall de cuatro metros en el Observatorio de Kitt Peak, comenzará a tomar datos en la primavera de 2019. La experiencia y las habilidades desarrolladas durante una década nos han llevado a afrontar nuevos retos tales como el desarrollo de sistemas innovadores de posicionadores de fibra óptica para la nueva generación de telescopios de entre diez y doce metros de gran de campo. En particular propusimos junto con la empresa suiza MPS y el grupo de la EPS-UAM un diseño para el telescopio de doce metros Maunakea Spectroscopic Explorer. Otra oportunidad que estamos valorando es un nuevo diseño para el futuro telescopio de la ESO que se dedicará a la espectroscopía multiobjeto de gran campo.Como resultado de nuestros desarrollos de robótica avanzada nuestro grupo se ha involucrado en dos colaboraciones transdisciplinarias en el campo de la neurociencia y la inyección celular. Esto se ha materializado en dos proyectos MINECO EXPLORA en colaboración con el Centro de Biología Molecular y la Facultad de Medicina de la UAM en Madrid. La actividad relacionada con el proyecto de neurociencia ha producido una patente que ya se presentó en 2016 (Dispositivo portátil no invasivo, sistema de posicionamiento, microscopio y método para activar individualmente células en un cultivo) y otra que está en preparación.
EQUIPO
Los ingenieros Marco Azzaro, Santiago Becerril y Justo Sánchez, y el astrofísico Francisco Prada, han formado el núcleo del equipo del IAA que ha estado involucrado desde 2007 en estos desarrollos instrumentales.
REFERENCIAS
Azzaro et al. 2010 (A fiber positioner robot for the Gran Telescopio Canarias, SPIE, 7735, 44)
Fahim et al. 2015 (An 8-mm diameter fibre robot positioner for massive spectroscopy surveys, MNRAS, 450, 794).
El desarrollo del prototipo para DESI dio lugar a la la realización de dos Proyectos Fin de Grado - Ingeniería de Telecomunicación supervisados por Guillermo González de Rivera en la EPS-UAM titulados Estudio de Sistemas de Comunicaciones para Aplicación en Robótica Cooperativa y el Sistema de Comunicación con altas restricciones de tiempo y consumo entre un maestro y múltiples esclavos, además de un Trabajo Fin de Master sobre el diseño de la electrónica, desarrollo del software de control y pruebas del robot para DESI y que constituye buena parte del trabajo presentado en el artículo de Fahim et al.
NOTAS
[1] Este proyecto, que dio como resultado una patente, fue financiado con una subvención del Plan Nacional AYA del MICINN (P.I. Francisco Prada) y una subvención del CDTI (P.I. AVS).
[2] Nuestras desarrollos y prototipos para BigBOSS y DESI fueron financiados por otro proyecto del CDTI (I.P. AVS), los proyectos del Plan Nacional del MINECO (I.P. F. Prada) y el último proyecto coordinado entre el IAA-CSIC y la EPS-UAM (P.I. F. Prada y G. González de Rivera). El Campus de Excelencia Internacional UAM+CSIC, el Proyecto Severo Ochoa del IFT-UAM/CSIC y el Proyecto Consolider MultiDark también contribuyeron a la financiación de estos desarrollos instrumentales para DESI.